製品技術部 櫻庭 洋平・戸羽 篤也・畑沢 賢一・中村 勝男
■研究の背景
製缶・機器ユニットなどの加工組立現場では、作業者の身体的負担が大きい中重量物(20~50kg)の運搬・組付作業が数多く見られます。これに対し現場では、ワークバランサなどのサポート器具が使われますが、操作感や機能制約などで課題が残されています。
本研究では、ひとつの物体を人間と機械とが同時に持ちながら、人間が加えた力に機械が追従動作する力覚協調運搬システムを試作し、制御性や作業性について評価しました。
■研究の要点
1.人間が把持物に与えた力に対してアクチュエータが追従動作する力覚協調運搬システムの試作
2.人間とアクチュエータとの負荷分担による効果と操作感覚への影響評価
3.従来型負荷サポート器具と比べた操作性の評価

力学協調運搬システム
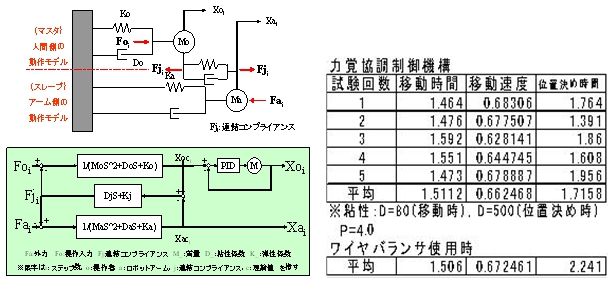
力覚協調制御モデル 作業性比較結果(抜粋)
1.多自由度アクチュエータと多軸力覚センサを使用した3自由度の人間-機械力覚協調運搬システム
を試作しました。
2.人間とアクチュエータとの負荷分担比率を制御することにより、操作感や動作速度を任意に調整すること
が可能となりました。
3.フランジ付鋼管の運搬・位置決め作業において、その操作性等をワイヤバランサと比較した結果、
本システムは、作業時間を短縮できることがわかりました。