情報システム部 浦池 隆文・多田 達実
■研究の背景
自動車や航空・宇宙等の先進的な分野では、HILS※(Hardware In the Loop Simulation)と呼ばれる設計開発手法が導入され、 開発効率の向上が図られています。近年は一次産業向け機械装置等の分野でもメカトロニクス化が進み、同手法による開発 サイクルの短縮や付加価値の向上が期待されますが、市販のシステムは非常に高価かつ複雑なことから、気軽に利用出来るものではありません。 そこで、可能な限り低コストで簡便なシステムの構築を目指して、汎用PCとフリーソフトウェアで構成されるリアルタイムシミュレータを開発し、 倒立振子の設計工程に適用することで機能の検証を行いました。
※装置を構成する機構部と制御部の設計を行う際、実機とリアルタイムシミュレータを組み合わせた統合的な検証を繰り返すことにより、 不具合の早期発見・修正や様々な条件下での性能評価を効率良く行う開発手法。
■研究の要点
1. リアルタイムシミュレータに要求される機能と構成の検討
2. シミュレーションの対象となるモデル(機構・制御アルゴリズム)の表現方法
3. 3D-CADで作成した機構設計データの活用
4. 倒立振子をモデルとした設計サイクルへの適用とシミュレーション機能の検証
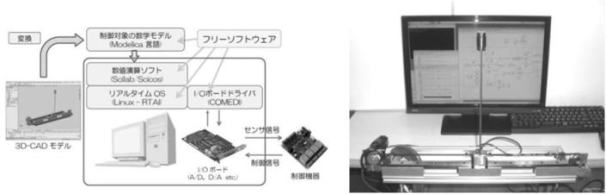
リアルタイムシミュレータの構成 倒立振子試験機
1. 汎用PCとPCI接続のI/Oボードで構成されるハードウェアに、リアルタイム拡張モジュールや、数値
演算システム等のフリーソフトウェアを組み合わせることで、リアルタイムシミュレータを構築しまし
た。
2. 3D-CAD(SolidWorks)で作成した設計データの活用について、各部品の質量特性や部品間の合致
設定に関する情報を取得するプログラムを作成し、解析用の数学モデルへ反映させる手法を確立
しました。
3. 倒立振子試験機の設計・製作に本シミュレータを適用し、制御アルゴリズムの検討やパラメータ調整
に有効であることを確認しました。
4. 今後はより複雑な機構のシミュレーションについて検討し、機能の充実を図る予定です。
北海道大学