情報システム部 中西 洋介・浦池 隆文・鈴木 慎一
■研究の背景本道では農場の大規模経営化が進み、農作業の効率化が求められています。 農作業は作業機を高速走行させることで作業効率が向上しますが、姿勢が乱れ、振動が激しくなります。 例えば農薬散布機は散布用作業アームが長いため、車輪が僅かな地面の凹凸に乗り上げるだけで先端が地面に 接触するなどの不具合が生じます。また、播種機では、土を掻き分けるオープナに対する土壌反力が大きくなり、 播種深さを一定にすることが難しくなります。そこで当場では、作業機の姿勢を一定に保持するための機構開発技術、 さらに振動を効率的に抑制するための制御技術に関する研究に取り組んでいます。
■研究の要点
1.アクティブ制御による農薬散布機作業アームの大振幅たわみ振動抑制技術
2.CAE動作シミュレーションを活用した姿勢安定化機構の開発
3.土壌粘弾性特性、オープナへの土壌反力を考慮した播種深さ解析手法の構築
4.試作機による実証試験
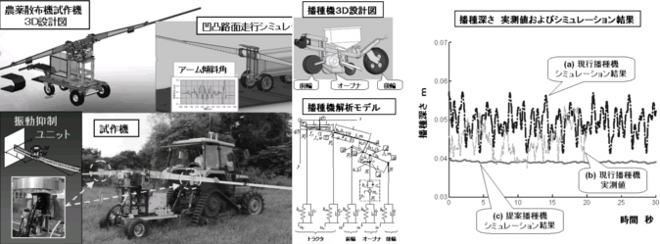
開発した農薬散布機姿勢保持機構 播種機の播種深さシミュレーション
1.農薬散布機作業アーム等、振動し易い作業アームに設置するだけでたわみ振動を抑制するコンパクトな
振動抑制ユニットを開発し、アームの振動が効率的に抑制できることを確認しました。
2.CAE動作シミュレーションを活用して農薬散布機作業アームの姿勢安定保持機構を開発しました。
3.実証試験で姿勢安定性を確認した結果、高速走行時でも安定姿勢を保持することができました。
4.市販CAEソフトウェアでは解析困難な播種機の播種深さを精度良く解析する手法を開発し、安定した播種深さと
機体姿勢を保持する機構を考案しました。
5.本研究成果は道内農業機械メーカに技術移転することで、道産農業機械の市場シェア拡大を図ることが期待
できます。今後も共同研究企業と連携して実用化を図る予定です。
北海道大学工学研究院、北海道農業研究センター