情報システム部 橋場 参生・大村 功
■研究の背景労働力人口の減少や、ゆとりある生活への欲求等を背景として、人に代わって様々な仕事をこなす自律型移動ロボットの実用化に 期待が寄せられています。しかし、GPSの電波が届かない屋内施設では、ロボットの自律移動に不可欠な位置情報を容易に入手する ことができません。そのため、施設内にロボットが認識できる特別なランドマークを敷設し、認識されたランドマーク情報から幾何計算 によって現在位置を推定する方法等が試みられていますが、その作業や開発もまた容易ではありませんでした。
そこで当場では、ロボットに搭載した一台のカメラを用いて、走行経路の上下左右(天井、壁、床等)の時空間画像を作成し、 その時空間画像を利用した簡易な演算によってロボットの現在位置を求める手法を考案しました(特許第2992883号)。 さらに、ロボットへの実装に適した形態での実用化を図るため、CMOSイメージセンサとFPGAを使用したカードサイズの 小型自己位置同定センサを開発しました。
■研究の要点
1.CMOSイメージセンサとFPGAを搭載したボードシステム設計
2.取得画像の周辺部を記録した時空間画像を生成するためのプログラム開発
3.事前に記録した時空間画像と走行時の時空間画像を照合するためのプログラム開発
4.照合に基づく位置同定結果をロボットに伝送するための通信インタフェース開発
5.ロボットへの実装と位置同定試験
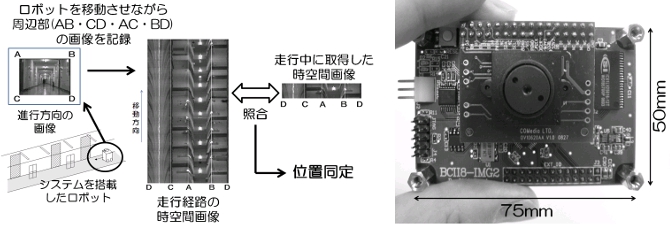
時空間画像の作成方法と位置同定方法 小型自己位置同定センサ
1.CMOSイメージセンサとFPGAを搭載した小型自己位置同定センサを開発しました。
2.移動ロボットに実装して走行試験を行い、良好な位置同定性能が得られることを確認しました。
3.進行方向の画像から位置同定を行う方式なので、障害物検出処理等を追加することも可能です。
4.経路周辺の状況を少ない容量で記録・蓄積できるので、環境変化の抽出用途等にも活用できます。