研究開発成果10/情報通信・エレクトロニクス・メカトロニクス関連技術
研究開発成果10/情報通信・エレクトロニクス・メカトロニクス関連技術
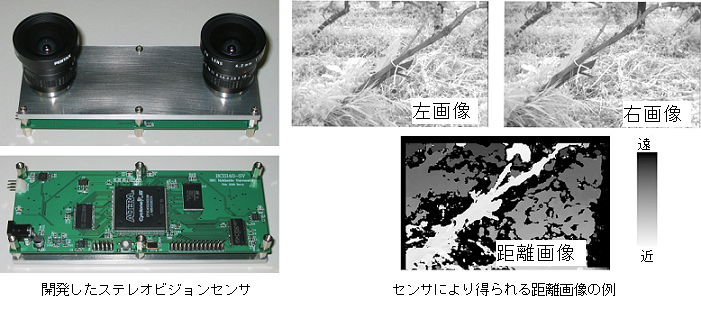
リアルタイムステレオビジョンセンサの開発
Development of a Real-time Stereo Vision Sensor for Embedded Systems
| 情報システム部 | 大村 功・三田村 智行 |
| ものづくり支援センター | 堤 大祐 |
■研究の背景
対象物との距離を計測できるステレオビジョンセンサは、従来の画像処理に比べて広い範囲に適用することが 可能であるため、作業機、ロボット、自動車など、さまざまな分野で実利用が検討されています。 しかし、膨大な演算量と屋外での安定性などが課題となっていました。
本研究では、このような実利用に対応するため、小型、省電力で高速処理を備えた組込みシステム向け ステレオビジョンセンサを開発しました。 屋外においても安定した計測が可能な処理手法として方向符号照合法を用い、 FPGA(Field Programmabe Gate Array)上に独自ハードウェアを設計することで、 高速処理性能と屋外での安定性を備えたセンサを実現しました。
■研究の要点
- 組込みシステム向け小型ステレオビジョンセンサの開発
- FPGAを用いたリアルタイム処理
- 方向符号照合法を用いた屋外での安定したステレオ処理
■研究の成果
- 2つのイメージセンサデバイスとFPGAを1つの基板に搭載した組込みシステム向け小型ステレオビジョンセンサを開発しました。
- FPGAを用いて独自のハードウェア処理を行い、毎秒60画面以上の高速処理を実現しました(752×480画素を対象とした視差127画素までのステレオ画像処理)。
- 屋外での計測試験を行い、安定した計測が可能であることを確認しました。今後は除草ロボットなど、屋外作業機向けの視覚センサとして応用展開を進めていく予定です。
北海道大学大学院情報科学研究科 北海道札幌市北区北14条西9丁目 Tel.011-706-6514