人手不足3 ロボットでイチゴハウス栽培を効率化
はじめに
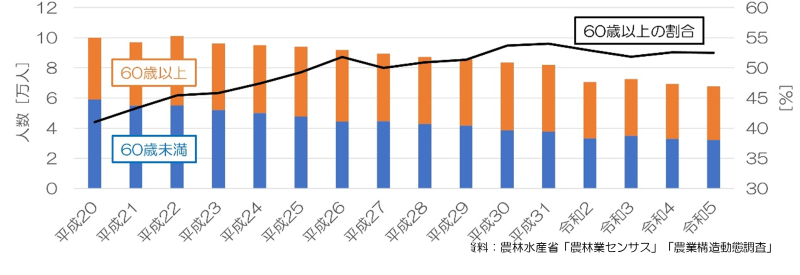
農業分野においては、高齢化と農業従事者の減少(図1)により人手不足が深刻な課題となっており、農作業の機械化・自動化に関する技術開発が求められています。その一例としてイチゴのハウス栽培を効率化する事例についてご紹介します。イチゴのハウス栽培では、不要な葉や芽を取り除くなどの管理作業をほぼ毎日行う必要があります。これらの作業は高温多湿なハウスの中ですべ全て手作業で行われており、大変な重労働となっています。そこで道総研では、管理作業の機械化と将来的な自動化に向けて、人と同様な作業を可能とする、遠隔操作型ハウス栽培ロボットの開発に取り組みました。
遠隔操作型ハウス栽培ロボット
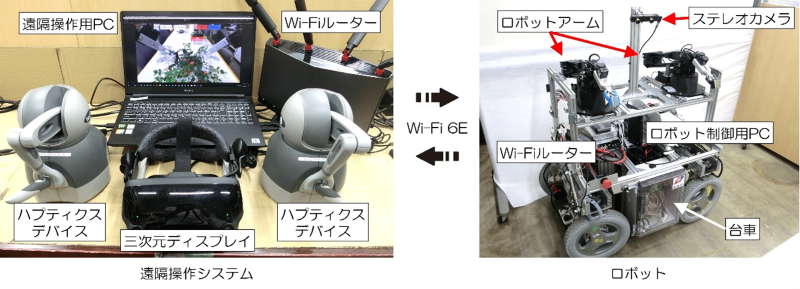
ロボットは移動台車にロボットアームを2機搭載しています。作業者はハウス内のロボットを遠隔操作し、ロボットに搭載されたステレオカメラの映像をVRゴーグルなどの三次元ディスプレイで立体的に見ながらロボットアームを操作してイチゴの管理作業を行います。作業者はWi-Fi無線通信で遠隔地からロボットを操作するため、作業環境の良い室内でロボットを操作できます(図2)。
移動台車の自動走行
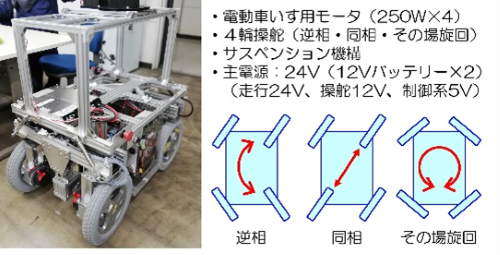
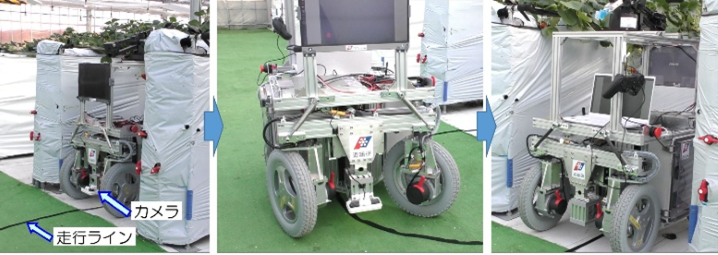
狭く限られたスペースのハウス内を円滑に走行するため、ロボットの移動台車は図3に示す四輪駆動・四輪独立操舵方式としました。ロボットは、ハウス内に敷設した走行ラインをカメラで認識しながら自動で走行します(図4)。また、走行ラインが複数に分かれる分岐点では、カメラ画像からその分岐点の形状(T字、十字など)を認識したうえで作業者へ進行方向の指示を仰ぎ、指示された方向へ自動で旋回します。
人の手先を模擬するロボットハンド
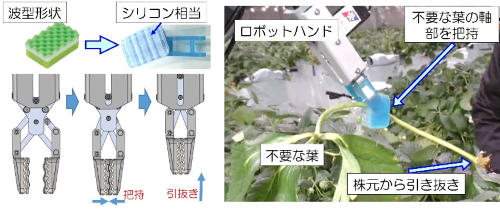
イチゴの管理作業では、茎の直径1~5mmの不要な葉や芽を確実に把持し、株元から引抜く必要があります。このため、図5に示すような2指タイプのロボットハンドを開発し、ロボットアーム先端に設置しました。本ロボットハンドの指先部はシリコン相当の柔軟な素材を使用し、表面を波型の凹凸とすることで、不用な葉や芽を人の手と同様に柔軟かつ確実に把持して引き抜くことができます。
ロボットの遠隔操作
作業者は、作業対象となる作物列の周辺を三次元ディスプレイで立体的に見ながらロボットの走行とアームの操作を行います。ロボットの前進と後進の切り替えなどの走行操作は、作業者の足元に設置したフットスイッチを使って簡単に操作可能です。ロボットアームの操作は、ハプティクスデバイスと呼ばれる入力装置を用いて行います(図6)。ペン状の操作部の位置と姿勢がロボットアームの位置と姿勢に一対一で対応しており、ペン状の操作部を持って動かすことで作業者は直感的にロボットアームを操作することができます。個人差はあるものの、未経験者でも短時間の試行で一連の操作が可能であることを確認しています。

今後の取組み
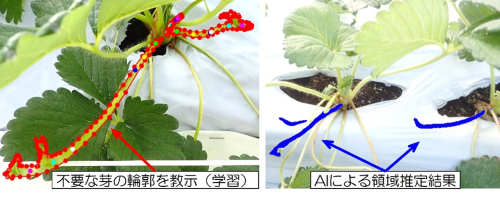
ハウス栽培管理作業を完全自動化するためには、現在人が行っている不要な芽の認識をロボットに行わせる必要があります。その一例として、不要な芽を認識するAIの構築を試みました。図7に、不要な芽の学習と認識結果の例を示します。図7左のように、人手により不要な芽の輪郭を教示した画像を複数作成してAIに学習させた結果、図7右に示すように不要な芽の領域を推定することができました。今後も本研究で開発した遠隔操作型ハウス栽培ロボットをベースとして、AIによる作業環境の認識と判断の高度化を図るなど、自動化へ向けた取り組みを進めます。
(浦池隆文 産業技術環境研究本部 工業試験場 産業システム部)