情報システム部 多田 達実・鈴木 慎一
■研究の背景水深50m程度までの海中浅水域には多くの水産養殖施設があり、継続的に調査が行われています。 現状では潜水士により水中カメラを用いた記録・調査が行われていますが、コスト高でこまめに行うことができません。 一方、最近の状況として水中ロボットが使われ始めていますがロボット自体が大きく、水産施設に多く見られる狭隘な領域では 調査に使用することができません。そこで、本研究では共同研究企業が農業用暗渠調査・洗浄装置の開発で蓄積した技術や ノウハウを活かし、浅水海域で行われている水産養殖業や海洋生物生態研究分野において活用できる海中調査ロボット を開発しました。
■研究の要点
1.ロボットの構造設計
2.防水技術の確立
3.前方障害物除去ノズルの開発
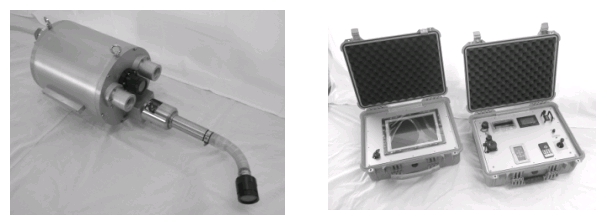
ロボット本体 コントローラ
1.農業用暗渠調査・洗浄装置の技術を活かし水中を調査するロボットを設計・試作することができました。
2. 水深50mに対する防水性を確保する技術を確立することができました。
3.前方障害物を水ジェットで除去する遠隔制御可能なノズルを開発することができました。
川崎建設㈱ 虻田郡京極町字三崎218番地9 Tel.0136-42-2077